 XRメモランダム
XRメモランダム 大規模空間に対応した高精度なARグラス向けSLAM
Cellid(セリッド)は2020年12月30日、ARグラス向けの空間認識エンジンである「Cellid SLAM」(※1)の提供開始を発表した。
※1 SLAM: Simultaneous Localization and Mapping (自己位置推定とマッピングの同時実行)の略
Cellid SLAMの特徴
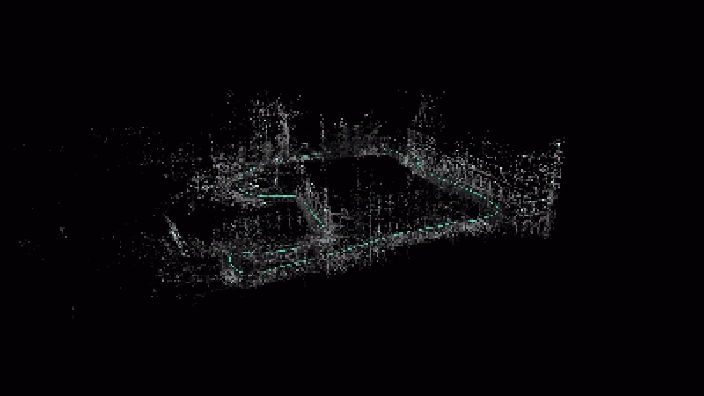
Cellid SLAMは独自の空間認識技術により、カメラとIMUデータを入力として、カメラ位置の推定とデジタルツイン(※2)の生成をリアルタイムで実行できる。
デジタルツインはクラウドに保存され、再利用することが可能。独自技術により計算負荷を軽減し、高精度で大規模なデジタルツインの作成が4G通信環境でも可能な点が特徴である。
※2 デジタルツイン: 空間の外形を3次元地図化したデータ
Cellid SLAM開発の背景
ARグラスは両手と両目をスマートフォンから解放する(ハンズフリー)、新しいデバイスとして期待されている。また、コンテンツを3D化することで、より没入感の高いユーザー体験を提供できる。
Cellid SLAMをARグラスに搭載することで、デジタル情報を違和感なく現実世界に投影でき、デバイスの強みをより引き出すことが可能になる。
Cellid SLAMの使用方法
Cellid SLAMはAndroidやLinux端末、Docker環境で使用可能。デジタルツインの保存や共有はサーバーを介して行うが、空間認識はカメラやIMUを搭載したエッジデバイス上で計算する。リアルタイム性を必要としないユースケースではサーバーで計算することも可能となっている。
今後の展望
同社が開発中のディスプレイモジュールとCellid SLAMを接続可能にする予定。空間を認識しデジタル情報を表示するまでの機能を一気通貫して提供することができ、より没入感の高いユーザー体験を実現するという。
【関連】 Cellid SLAMに関するプレスリリース一覧
● 建設現場における作業ステータスの解析手法に関する共同研究を大林組と開始 (2022/10/25)
● Visual SLAMを用いて、撮影者の移動状況や天候・周囲環境に左右されないロバストな位置情報取得を実現 (2022/8/2)
● 動画から3次元位置情報を事後的に把握できる「Off-line Position Finder API」を正式リリース (2022/3/11)
● AR技術により取得された高精度3次元位置情報をデジタルツイン環境にリアルタイム統合することに成功 (2021/10/1)
● 単眼カメラの映像から作業者の3次元位置情報を可視化できる「Position Finder」ベータ版をリリース (2021/9/16)
● AR技術を用いた大規模建設現場での3次元位置情報の取得に成功 (2021/5/26)
● AR技術による工場オペレーション高度化についての実証実験を実施 (2021/5/24)
【出典:PR Times】

